2024年11月24日,第56次《中国科学:信息科学》前沿学术沙龙在武汉成功举办。本次学术沙龙以“复杂系统控制及应用”为主题,由《中国科学:信息科学》编委会主办,华中科技大学数学与统计学院、数学与应用学科交叉创新研究院联合组织承办。

来自清华大学、华南理工大学、大连理工大学、北京理工大学、东北大学、华中科技大学、中国地质大学(武汉)、武汉工程大学、中南民族大学、中国科学院数学与系统科学研究所等十余所高校和科研院所的专家学者、青年教师、研究生等七十余人通过线上、线下相结合的方式参加了本次学术沙龙。

开幕式由华中科技大学数学与统计学院副院长吴付科教授主持,他代表承办方对每位与会专家和学者以及学生的到来表示热烈欢迎。

数学与应用学科交叉创新研究院院长郭照立教授介绍了华中科技大学数学学科和交叉研究院的建设和发展历程,并对专家们的到来表示热烈的欢迎。

《中国科学:信息科学》副主编张纪峰研究员致辞,他强调了创建和发展国内期刊的重要性,就国内期刊的品牌和体系建设和发展发表了深刻见解,并诚挚希望国内专家学者继续大力支持中国期刊的发展。
本次沙龙邀请九位专家学者开展了精彩的学术报告。首先清华大学周彤教授报告题为“非均匀、慢采样下的网络化系统结构辨识”,引入一种基于输出连接的大规模网络化系统描述方式,给出网络化系统结构可辨识的判断方法,提出一种不依赖于采样间隔和速率的网络化系统结构估计方法,讨论其在非同步采样、非线性网络化系统等的推广。
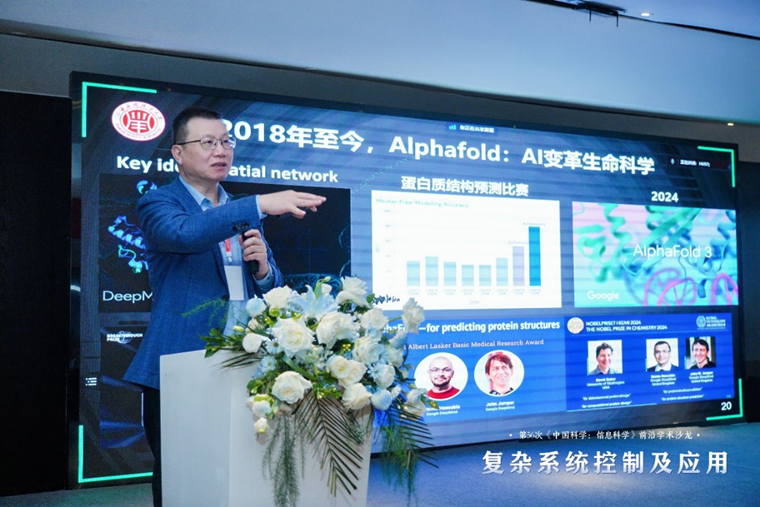
上海应用技术大学汪小帆教授以“智能时代的网络科学:机遇与挑战”为题,报告重点阐述了人工智能在网络科学中的应用前景,包括值得注意的问题和面临的挑战。
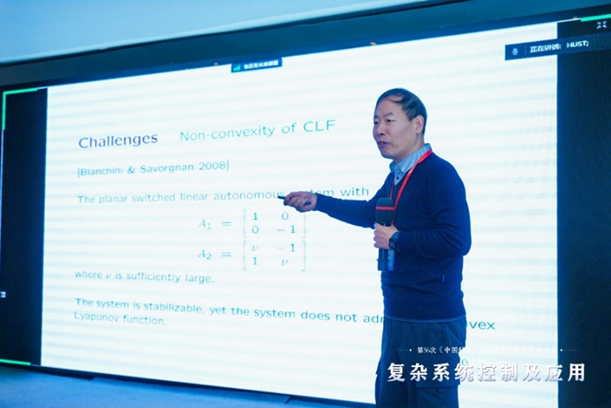
山东科技大学孙振东教授进行了“切换线性系统的安全攸关设计”的报告,针对连续时间切换线性系统,发展了相应的系统分析方法,通过综合优化系统的暂态和渐近性能,探索凸安全区域和非凸安区域的基本性质,给出构造性的算法设计。
东北大学杨东升教授线上开展了“主动磁悬浮系统控制方法与技术”的报告,报告针对磁悬浮控制中电-磁-热-力的模型与控制问题,建立了磁浮电系统分数阶模型,并提出了转子位移壁垒控制方法,为磁悬浮轴承转子的模型建立与转子位移控制器的设计提供了理论依据。

华东理工大学唐漾教授以“微纳星群信息自主传输、协同观测与决策优化”为题,从星群网络中信息路由机制、节点间信息分享方式和星群中信息智能应用三个层次开展基础理论研究和关键技术攻关。

大连理工大学赵旭东教授报告介绍了仿海胆机器人研究所取得的部分成果,为机器人技术在应对复杂环境挑战中的应用提供了更为全面和深入的理解。
中原工学院校长、北京理工大学夏元清教授以“State estimation and fault diagnosability for multi-sensor cloud controI systems”为题进行了线上报告,并介绍了其团队在多传感器云控制系统的状态估计和故障诊断领域的前沿成果。
北京理工大学孙健教授线上报告介绍了网络化系统数据驱动控制方法的研究进展,包括网络化系统的数据驱动事件触发控制与自触发控制、拒绝服务攻击下的数据驱动弹性控制、基于轨迹预测的数据驱动自触发控制、 基于噪声数据的鲁棒LQG控制器等内容。
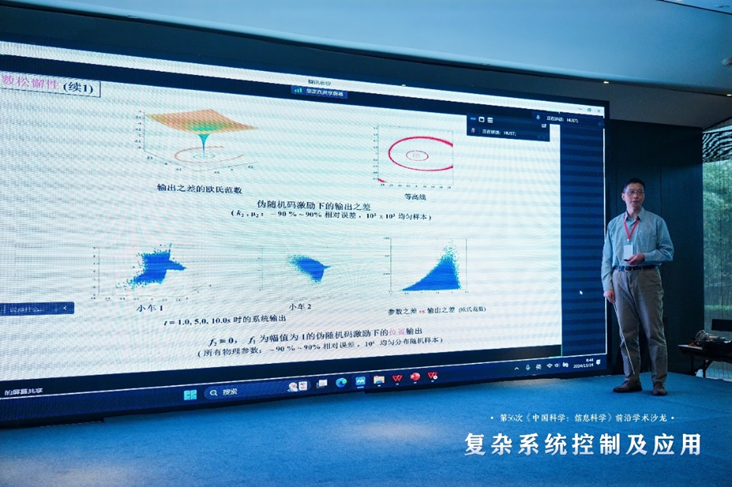
华南理工大学邓飞其教授的线上报告分享了对随机现象与随机系统模型的理解,介绍了他关于滞后随机系统控制理论的近期相关研究。

最后,华中科技大学数学与统计学院副院长吴付科教授代表承办方作总结致辞,宣布本次会议圆满落下帷幕。此次学术沙龙的成功举办,为复杂系统控制及应用的科学研究提供了专业的学术交流平台,为我校信息科学的学科发展提供了积极助力。



